|
|

楼主 |
发表于 2023-4-12 15:06:06
|
显示全部楼层
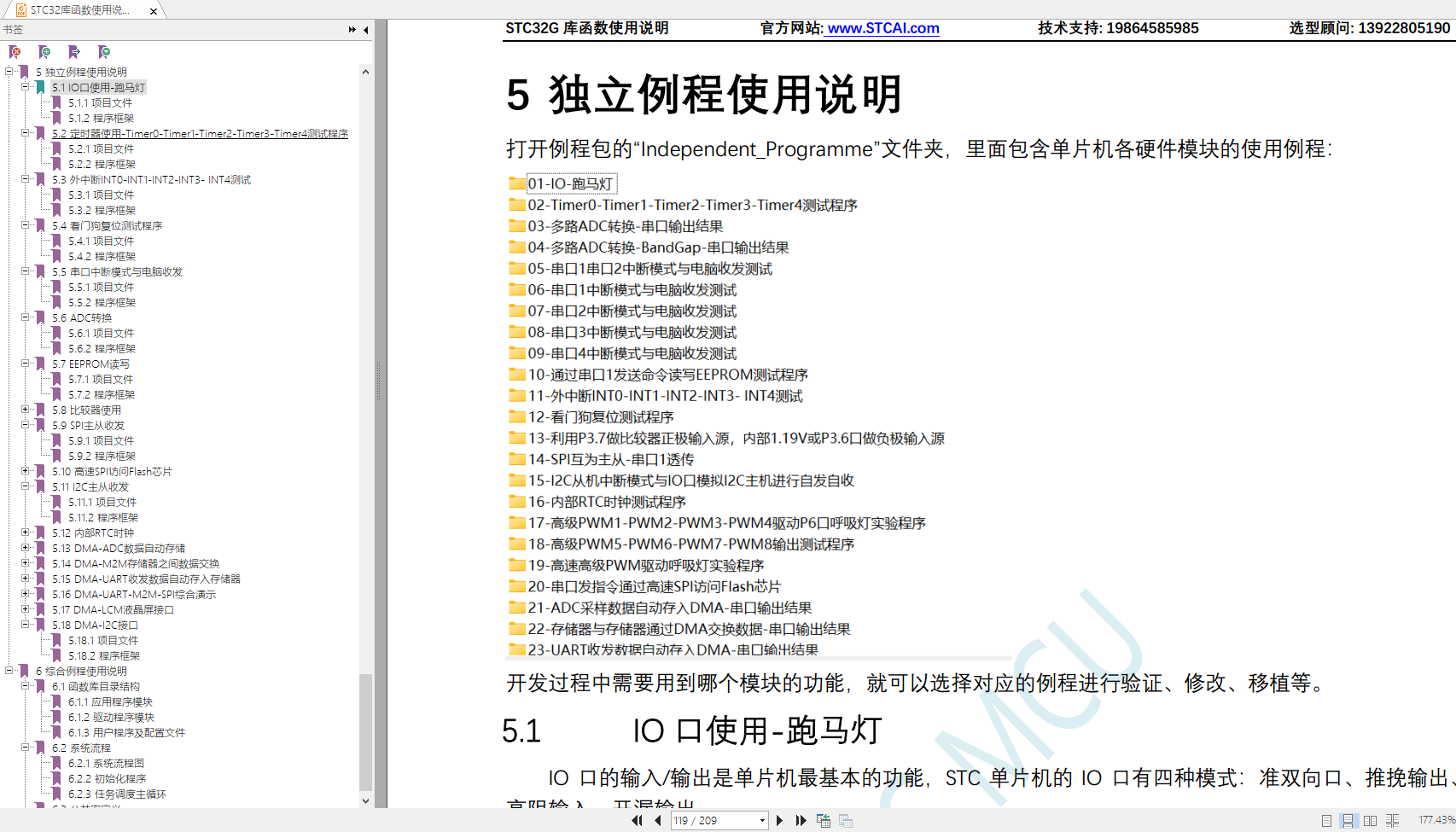
4.12 ADC库函数源文件介绍:
范例程序如下:
#include "config.h"
#include "STC32G_GPIO.h"
#include "STC32G_ADC.h"
#include "STC32G_UART.h"
#include "STC32G_Delay.h"
#include "STC32G_NVIC.h"
#include "STC32G_Switch.h"
/************* 功能说明 **************
本程序演示16路ADC查询采样,通过串口1(P3.0,P3.1)发送给上位机,波特率115200,N,8,1。
需要在"STC32G_UART.h"里设置: #define PRINTF_SELECT UART1
用定时器做波特率发生器,建议使用1T模式(除非低波特率用12T),并选择可被波特率整除的时钟频率,以提高精度。
下载时, 选择时钟 22.1184MHz (可以在配置文件"config.h"中修改).
******************************************/
/************* 本地常量声明 **************/
/************* 本地变量声明 **************/
/************* 本地函数声明 **************/
/************* 外部函数和变量声明 *****************/
/******************* IO配置函数 *******************/
void GPIO_config(void)
{
P0_MODE_IN_HIZ(GPIO_Pin_LOW | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6); //P0.0~P0.6 设置为高阻输入
P1_MODE_IN_HIZ(GPIO_Pin_All); //P1.0~P1.7 设置为高阻输入
P3_MODE_IO_PU(GPIO_Pin_0 | GPIO_Pin_1); //P3.0,P3.1 设置为准双向口
}
/******************* AD配置函数 *******************/
void ADC_config(void)
{
ADC_InitTypeDef ADC_InitStructure; //结构定义
ADC_InitStructure.ADC_SMPduty = 31; //ADC 模拟信号采样时间控制, 0~31(注意: SMPDUTY 一定不能设置小于 10)
ADC_InitStructure.ADC_CsSetup = 0; //ADC 通道选择时间控制 0(默认),1
ADC_InitStructure.ADC_CsHold = 1; //ADC 通道选择保持时间控制 0,1(默认),2,3
ADC_InitStructure.ADC_Speed = ADC_SPEED_2X16T; //设置 ADC 工作时钟频率 ADC_SPEED_2X1T~ADC_SPEED_2X16T
ADC_InitStructure.ADC_AdjResult = ADC_RIGHT_JUSTIFIED; //ADC结果调整, ADC_LEFT_JUSTIFIED,ADC_RIGHT_JUSTIFIED
ADC_Inilize(&ADC_InitStructure); //初始化
ADC_PowerControl(ENABLE); //ADC电源开关, ENABLE或DISABLE
NVIC_ADC_Init(DISABLE,Priority_0); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
}
/*************** 串口初始化函数 *****************/
void UART_config(void)
{
COMx_InitDefine COMx_InitStructure; //结构定义
COMx_InitStructure.UART_Mode = UART_8bit_BRTx; //模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTx
COMx_InitStructure.UART_BRT_Use = BRT_Timer1; //选择波特率发生器, BRT_Timer1,BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)
COMx_InitStructure.UART_BaudRate = 115200ul; //波特率, 110 ~ 115200
COMx_InitStructure.UART_RxEnable = ENABLE; //接收允许, ENABLE或DISABLE
UART_Configuration(UART1, &COMx_InitStructure); //初始化串口 UART1,UART2,UART3,UART4
NVIC_UART1_Init(ENABLE,Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
UART1_SW(UART1_SW_P30_P31); //UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44
}
/**********************************************/
void main(void)
{
u8 i;
u16 j;
WTST = 0; //设置程序指令延时参数,赋值为0可将CPU执行指令的速度设置为最快
EAXSFR(); //扩展SFR(XFR)访问使能
CKCON = 0; //提高访问XRAM速度
GPIO_config();
UART_config();
ADC_config();
EA = 1;
printf("STC32G AD to UART Test Programme!\r\n"); //UART发送一个字符串
while (1)
{
for(i=0; i<16; i++)
{
delay_ms(200);
//Get_ADCResult(i); //参数0~15,查询方式做一次ADC, 丢弃一次
j = Get_ADCResult(i); //参数0~15,查询方式做一次ADC, 返回值就是结果, == 4096 为错误
printf("AD%02d=%04d ",i,j);
if((i & 7) == 7) printf("\r\n");
}
printf("\r\n");
}
}
KEIL编译如下:
烧录到芯片后,下载软件上发送数据测试如下:
|
本帖子中包含更多资源
您需要 登录 才可以下载或查看,没有账号?立即注册


x
|



 IP归属地
IP归属地 雷达卡
雷达卡 发表于 2023-4-4 10:13:59
发表于 2023-4-4 10:13:59


 提帖卡
提帖卡 置顶卡
置顶卡 锁帖卡
锁帖卡 解锁卡
解锁卡 显目卡
显目卡 千斤顶
千斤顶