爱科技、爱创意、爱折腾、爱极致,我们都是技术控
您需要 登录 才可以下载或查看,没有账号?立即注册


x

凤凰网科技讯 4月19日,阿里巴巴旗下高德今日发布面向AGI的全栈具身智能技术体系ABot,并宣布全面开源。基于该技术架构的首款四足机器人高德途途将在4月19日举办的北京亦庄机器人半程马拉松上公开测试,主要展示复杂避障与人群穿行等实地作业能力。
该技术体系以闭环模式运作,涵盖数据、模型与应用三层架构。据高德披露,ABot系列模型已在15项行业基准测试中取得领先成绩。在数据生成端,其底层仿真基座ABot-World采用14B DiT架构,通过在虚拟环境中合成视频、深度、点云等多种训练数据并配合强化学习引擎,以仿真数据替代高成本的真机采集,旨在降低具身智能模型的训练门槛。
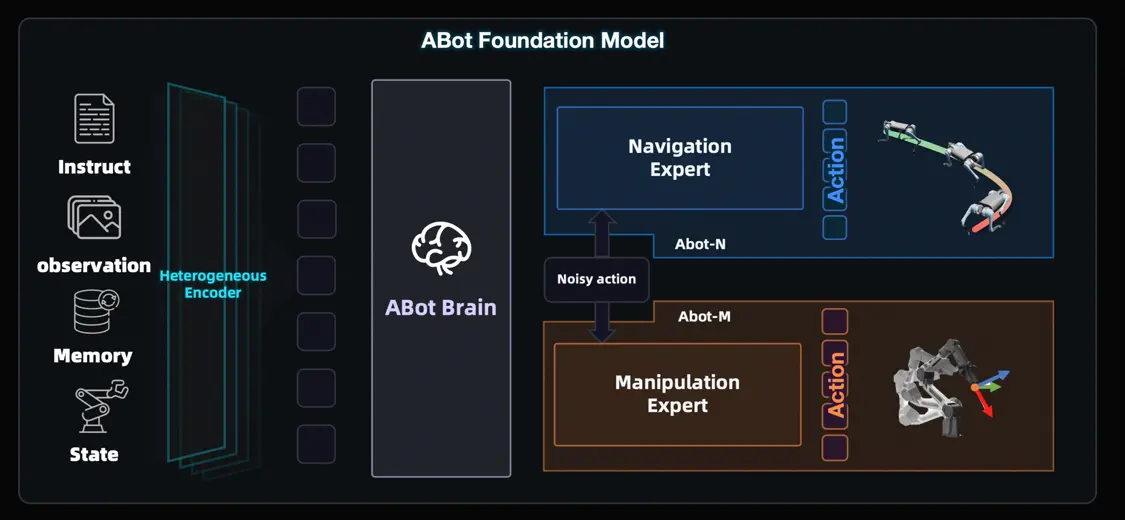
ABot-N& ABot-M:ABot体系的“运动双核” 在模型执行层面,ABot体系采用“双核”设计,分为负责导航的ABot-N与负责操作的ABot-M。这两款基座模型分别处理空间移动意图与精细动作控制,通过模型协同调度完成复杂长程任务,并支持跨形态机器人的适配。测试数据显示,两款模型在多项导航与操作类的权威评测中表现稳定。
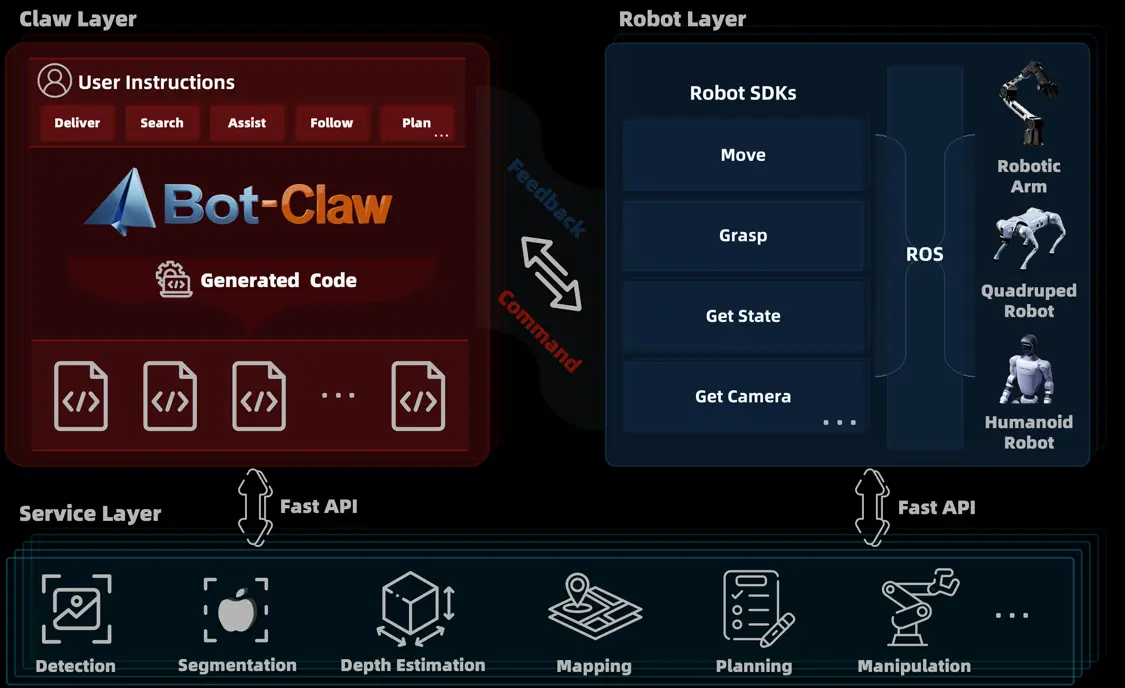
在应用终端层面,其核心控制中枢ABot-Claw引入了“地图即记忆”的设计思路,将高德地图全局信息与用户局部数据结合作为认知锚点,通过“云端大脑-边缘响应”的架构,支持不同机器人的协同作业与任务接力。高德方面表示,将开源ABot全技术体系,开放基于上万种真实场景和千万级多模态数据训练的底层资源,以促进行业技术迭代。
| 


 IP归属地
IP归属地 雷达卡
雷达卡 发表于
发表于 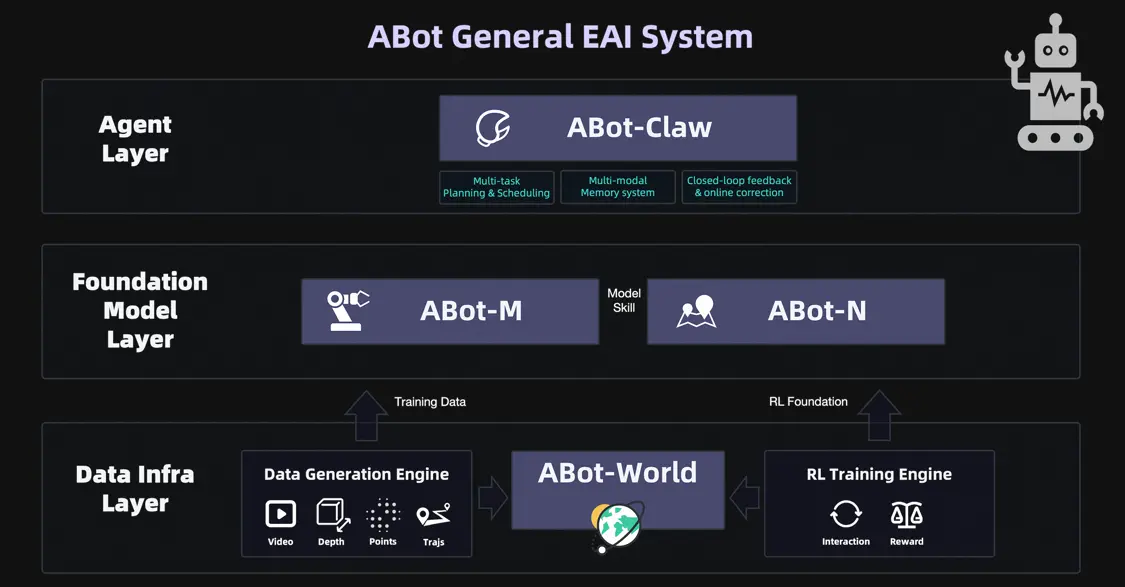
 提帖卡
提帖卡 置顶卡
置顶卡 锁帖卡
锁帖卡 解锁卡
解锁卡 显目卡
显目卡 千斤顶
千斤顶